Project Gallery
Explore images from our Coal Handling Plant monitoring and control system project
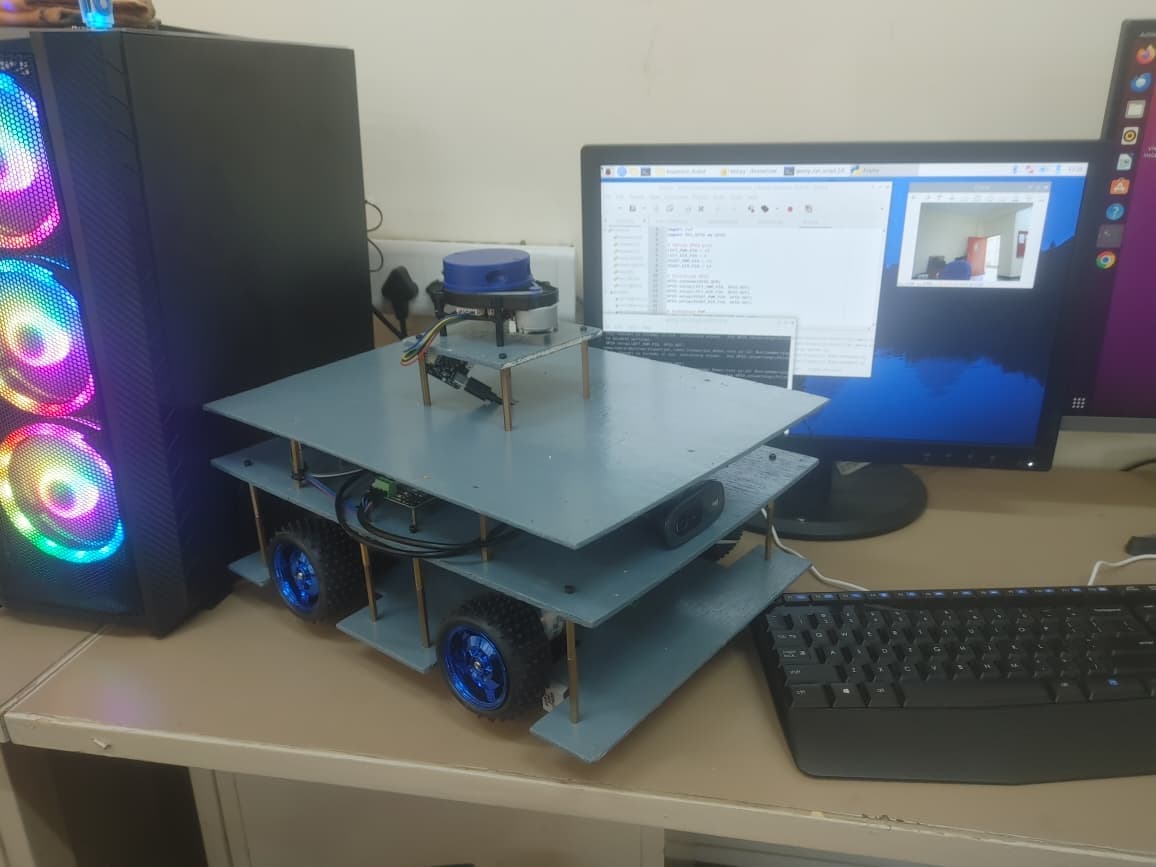

Image 1 of 3
Objective
This project develops a comprehensive robotic and sensor-based control system for coal handling plants. It integrates real-time monitoring, anomaly detection, and PLC automation to optimize conveyor system operations, improve safety, and reduce maintenance costs.
Technical Overview
Sensors
Distance sensors are used for conveyor belt data collection, enabling real-time monitoring of belt position, alignment, and operational parameters.
Control System
LVDTs (Linear Variable Differential Transformers) are finalized for sway input. PLC logic is optimized for real-time master idler control, ensuring precise alignment and operation.
Automation
Sway switches are analyzed for fault detection and master idler alignment, providing automated monitoring and corrective actions.
Innovation
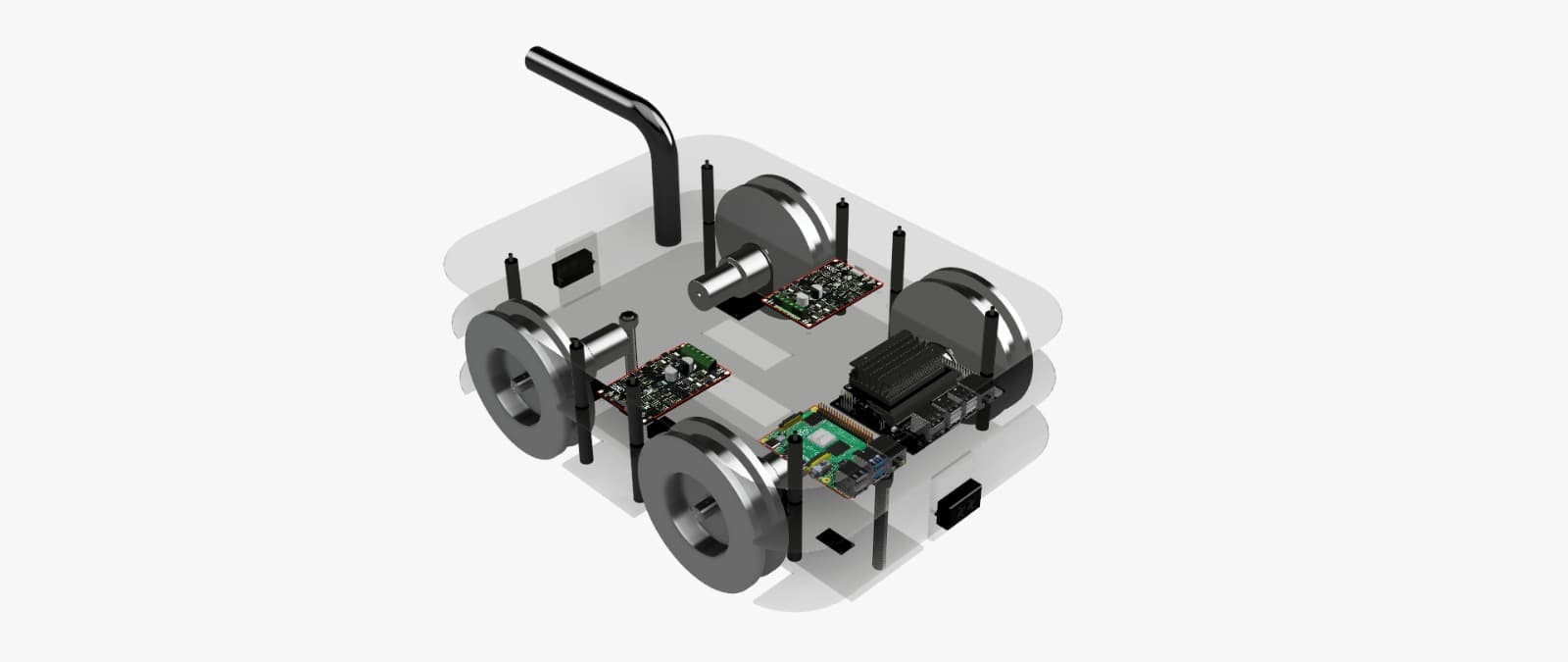
A Tracked Robot is introduced for conveyor belt inspection and monitoring, enabling autonomous inspection capabilities.
Tracked Robot Features
Tracked Wheel System
Designed for rough terrain stability, enabling reliable operation in challenging industrial environments.
High-Resolution Camera
Provides visual inspection capabilities for detailed monitoring and documentation of conveyor belt conditions.
Advanced Sensors
Equipped with sensors for detecting heat, vibration, and obstructions, enabling comprehensive monitoring.
Wireless Communication
Features wireless communication and power management for extended operational autonomy.
Control & Feedback
Remote Operation
The system supports remote operation via console or tablet, providing flexible control and monitoring capabilities from any location.
Live Monitoring
Provides live video feed and anomaly alerts with historical data logging, enabling comprehensive monitoring and analysis of system performance.